





Fırçasız DC motorlar, verimli ve güvenilir oldukları için fırçalı motorlara göre daha az bakım gerektirdikleri için kullanılır. Fırça yerine elektronik kommutasyon kullanırlar, bu da kontrolü artırır ve aşınmayı azaltır. Performansları motor tasarımına, zamanlamaya, geri bildirime, kontrol yöntemine, sürüş elektroniğine, hız-tork davranışına ve ısı sınırlarına bağlıdır. Bu makale tüm bu noktalar hakkında bilgi vermektedir.

Fırçasız DC Motor Temelleri
Fırçasız DC motor (BLDC) nedir?
Fırçasız DC Motor (BLDC), fırçalar ve mekanik kommutatör yerine elektronik kommutasyon kullanarak çalışan bir DC kaynağınla çalışan kalıcı mıknatıslı bir motordur. Bir kontrolör, stator sarımları üzerinden akımı planlı bir dizi olarak değiştirerek dönen bir manyetik alan oluşturur. Rotor, bu dönen alanı takip eden kalıcı mıknatıslar içerir ve bu da dönüş üretir. Bir komütatörde fırça sürtünmediği için mekanik aşınma azalır, bakım daha düşük olur ve verimlilik genellikle daha yüksektir. Hız ve tork, kontrolcünün anahtarlamayı nasıl zamanladığı ve voltaj ile akımı nasıl ayarladığına bağlıdır.
BLDC vs Fırçalanmış DC vs PMSM
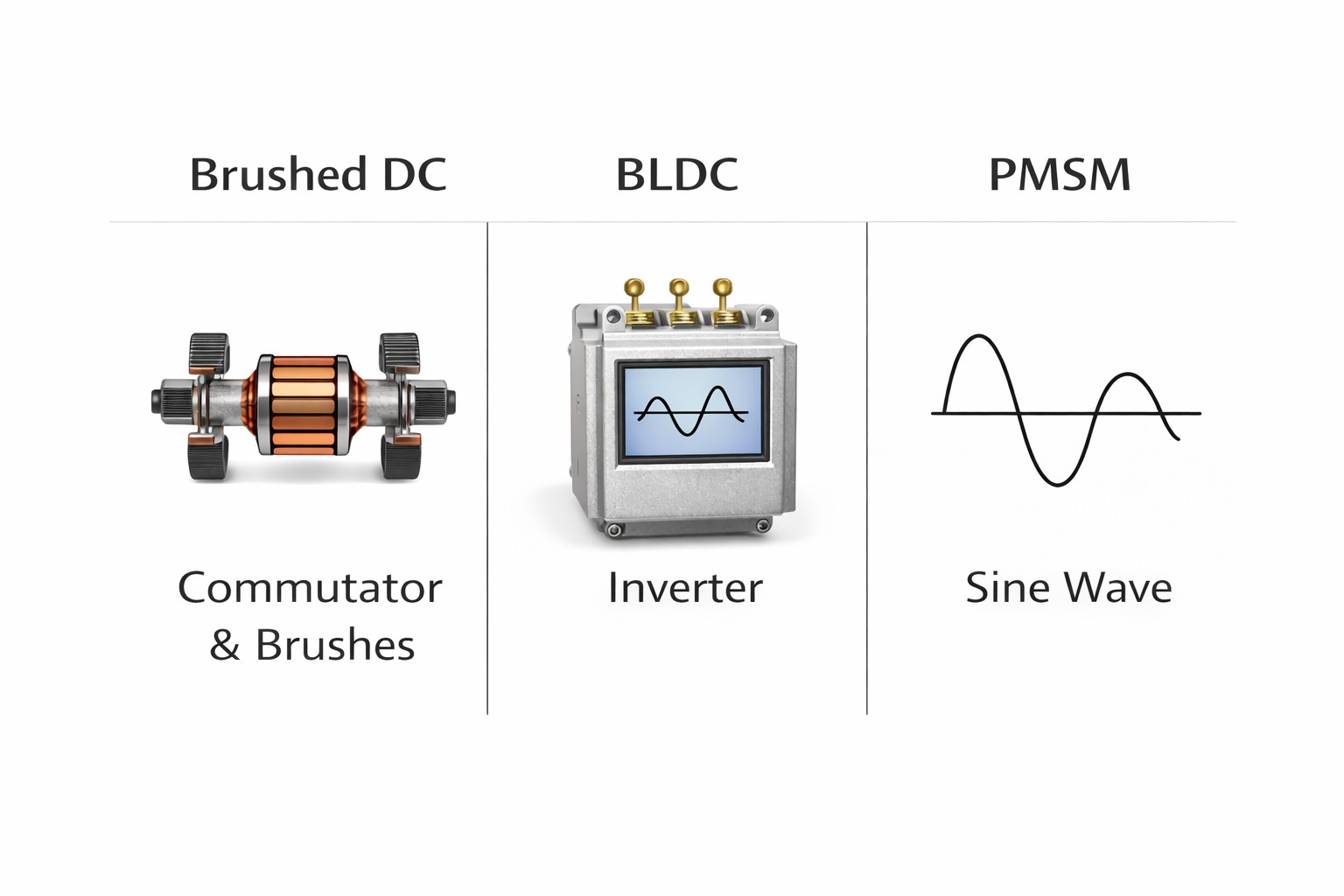
Fırçalı DC motorlar, motor içindeki akımı değiştirmek için fırçalar ve bir komütatör kullanır; bu da kontrolü kolaylaştırır ama aşınma parçalarını ekler. BLDC motorları fırçaları çıkarır ve stator fazlarını elektronik bir kontrolör kullanarak değiştirir, böylece değişim elektronik olarak gerçekleştirilir. PMSM motorları ayrıca kalıcı mıknatıs ve elektronik kontrol kullanır, bu yüzden donanımları BLDC motoru gibi görünebilir. Ortak fark, motorun voltaj dalga şekli ile kontrolcünün fazlı nasıl yönlendirdiğidir. BLDC sistemleri genellikle trapezoidal dalga formları ve basamak bazlı kombinasyonla ilişkilendirilirken, PMSM sistemleri genellikle sinüzoidal dalga formları ve daha düzgün kontrol yöntemleriyle ilişkilendirilir.
Elektronik Eşleştirme ve Anahtarlama Zamanlaması
Fırçasız DC Motor Çalışma Temelleri
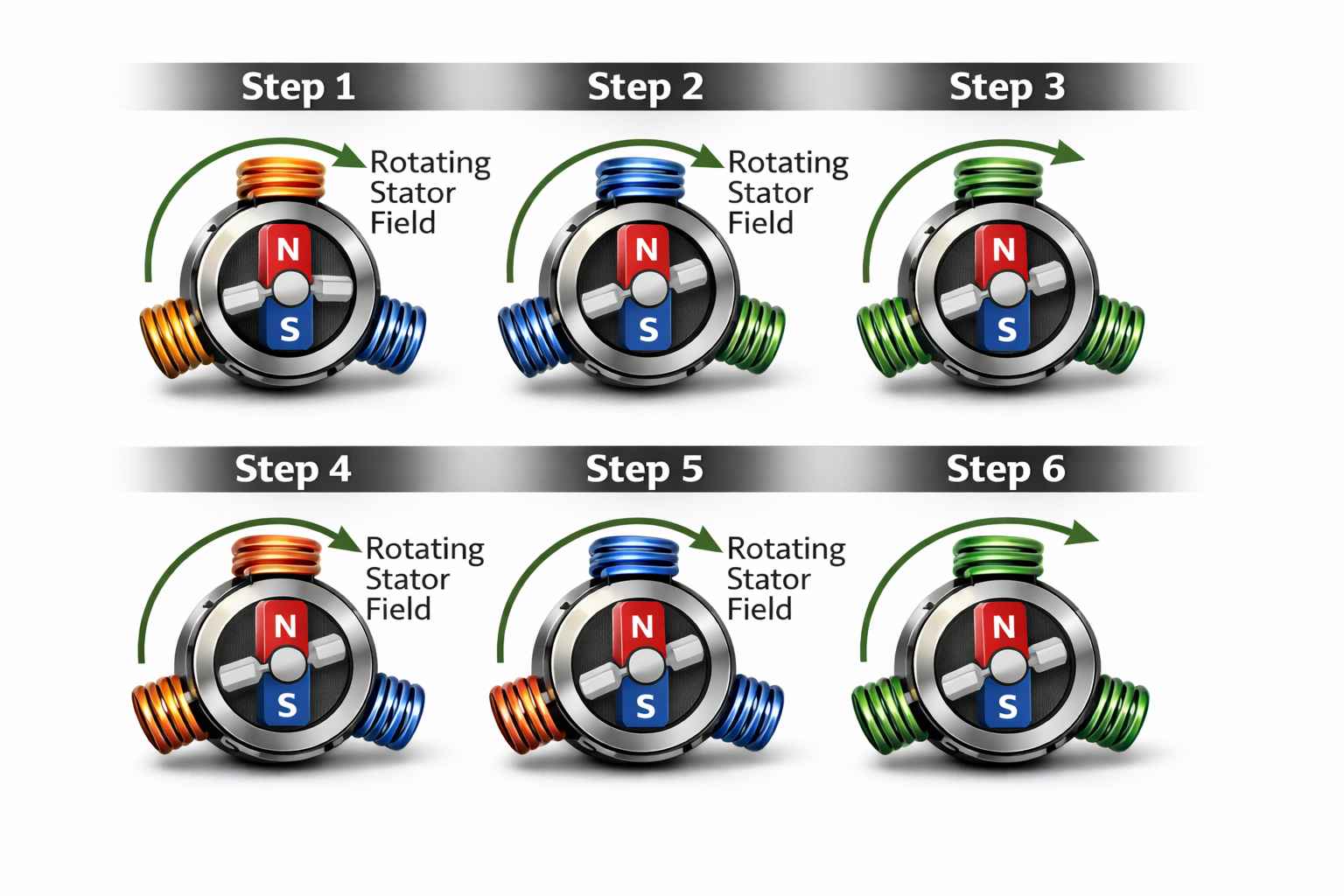
Bir BLDC motoru, stator sarımlarındaki akım rotorun kalıcı mıknatıslarıyla etkileşime giren bir manyetik alan oluşturduğunda hareket oluşturur. Kontrolör akımı sargılara tekrar eden bir sırayla gönderir, böylece statorun manyetik alanının en güçlü kısmı motor etrafında sürekli kaydırır. Bu kayan desen dönen bir manyetik alan gibi davranır. Stator alanı hareket ettikçe, rotor mıknatısları onunla hizalı kalmak için dönmeye devam eder. Bu sabit takip hareketi, sürekli dönüş ve tork üretir.
Zamanlama Anahtarlama ve Etkileri
• Anahtarlama çok erken gerçekleştiğinde, stator alanı rotor pozisyonuna öncülük eder ve tork zayıflar.
• Anahtarlama çok geç gerçekleştiğinde, stator alanı rotorun gerisinde kalır ve tork dalgası artar.
• Doğru anahtarlama zamanlaması tork verimliliğini artırır ve gürültü ile titreşimi azaltır.
BLDC Motor Yapımı ve Çekirdek Bileşenler
Çekirdek Motor Parçaları
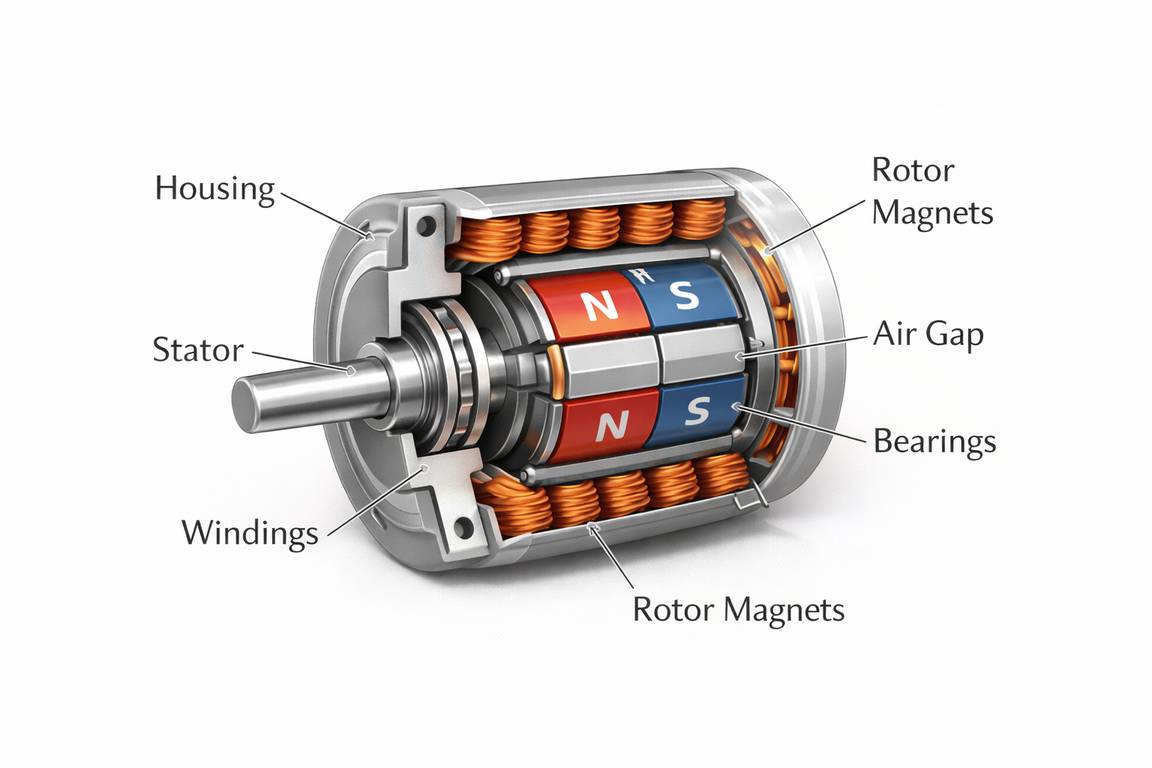
Bir BLDC motoru, bir stator, kalıcı mıknatıslı bir rotor, bir hava boşluğu, rulmanlar ve bir gövdeden oluşur. Statör lamine çelikten yapılmıştır ve dönen manyetik alanı üreten çok fazlı sarğılar taşır. Rotor, bu dönen alanı takip eden kalıcı mıknatıslar içerir ve hareket üretir. Statör ile rotor arasındaki hava boşluğu, manyetik bağlantıyı, tork yoğunluğunu ve düzgün çalışmayı etkiler. Rulmanlar şaftı destekler ve sürtünme, titreşim ve hizmet ömrünü etkiler. Gövde, montajı hizalı tutar ve motordan ısı gidermeye yardımcı olur.
Rotor Tasarım Faktörleri
Rotor tasarımı tork, hız davranışı ve mekanik güç üzerinde etkiler. Kutup sayımı, elektriksel kommutasyon ile mekanik dönüş arasındaki ilişkiyi belirler; Daha fazla direk düşük hızlı torku iyileştirir ancak daha hızlı elektrikli anahtarlama gerektirir. Mıknatıs yerleşimi de performansı etkiler. Yüzeye monte edilen mıknatıslar yaygın ve basittirken, iç mıknatıslar yüksek hızlarda daha iyi mekanik tutumu sağlar. Mıknatıs malzeme, manyetik güç ve sıcaklık kararlılığını belirler, tork kapasitesini ve güvenilirliğini etkiler.
Dönüş Bağlantıları: Star (Wye) vs Delta
BLDC motorlarındaki statör sarımları genellikle yıldız (wye) veya delta şeklinde birbirine bağlanır.
| Bağlantı | Pratik etki (tipik) | Desteklediği şeyler |
|---|---|---|
| Yıldız (Wye) | Daha düşük hızda volta başına daha yüksek tork | Sınırlı voltajda daha güçlü düşük hızlı çalışma |
| Delta | Aynı voltajda daha yüksek hız potansiyeli | Tork talebi daha düşük olduğunda daha yüksek devir |
Rotor Pozisyon Tespiti ve Geri Besleme Seçenekleri
Sürücünün Neden Rotor Pozisyonuna Ihtiyacı Var?
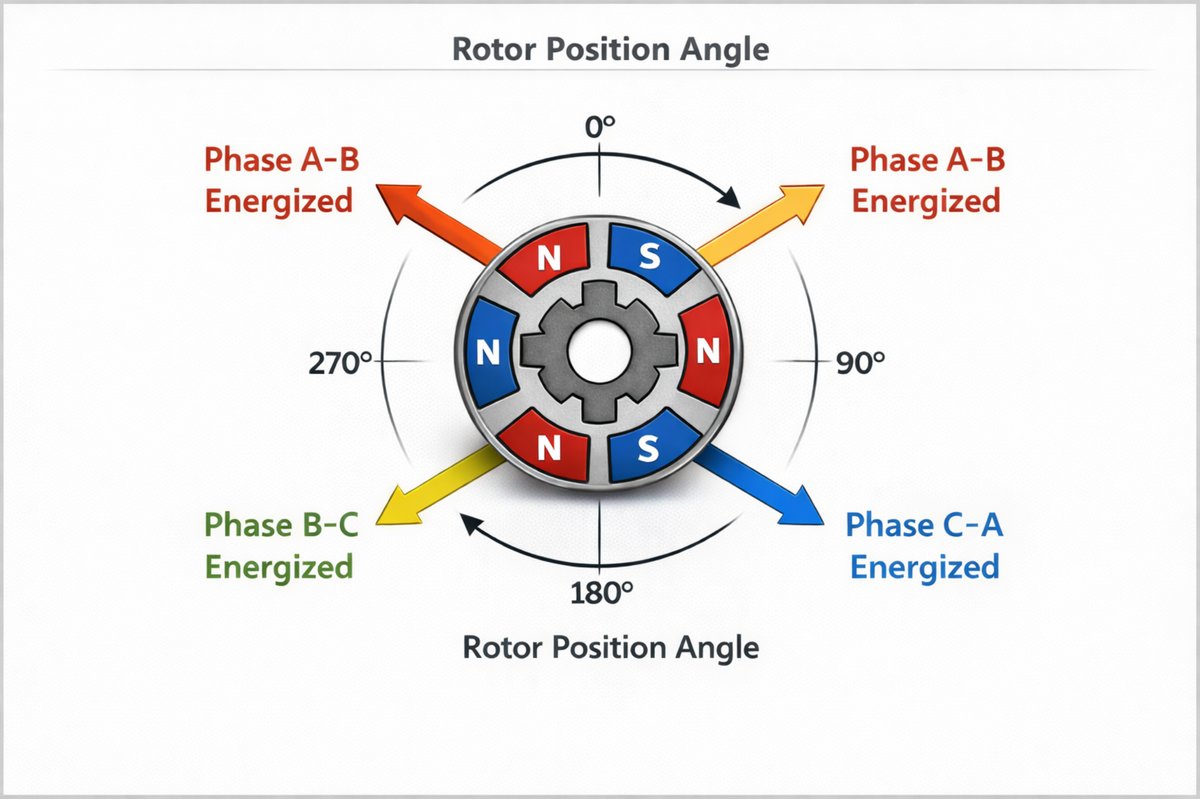
Kontrolcü, rotorun konumunu bilmeli (veya tahmin etmeli) ki doğru fazları doğru zamanda enerji verebilsin. Rotor pozisyon bilgisi olmadan, çalışma ve düşük hızlı çalışma sırasında dönüşüm zamanlaması kayıyor, tork düşüyor ve ısınma artışı oluyor.
Hall Sensörleri vs Kodlayıcılar vs Sensörsüz BLDC
• Hall sensörleri: temel işe gidip gelme ve güçlü başlangıç torku için uygun fiyatlı ve güvenilir.
• Kodlayıcılar/çözücüler: doğru hız/konum kontrolü gerektiğinde kullanılır.
• Sensörsüz (arka EMF tabanlı): daha az tel/parça, ancak zayıf geri EMF nedeniyle çok düşük hız ve başlatmada daha zor.
BLDC Değişim ve Kontrol Yöntemleri
Değişim Stilleri: 6-Step vs Sinusoidal / FOC
| Yöntem | Kontrolcü ne yapar | Sonuç |
|---|---|---|
| 6-step (trapezoidal) | Fazları ayrık adımlarla değiştirir | Basit ve sağlam; Daha fazla dalga/gürültü mümkün |
| Sinüzoidal / FOC | Vektör kontrolü kullanarak düzgün faz akımlarını sürer | Daha yumuşak tork; Genellikle geniş bir aralıkta daha sessiz ve verimli |
6-adım ne zaman mantıklı mı yoksa FOC daha iyi olduğunda
Her iki yöntem de iyi çalışır, ancak farklı amaçlar için seçilirler.
• 6 adımlı genellikle basitlik, maliyet ve dayanıklılık önemli olduğunda seçilir.
• FOC, geniş bir hız aralığında düzgün tork, düşük gürültü ve hassas kontrol önemli olduğunda seçilir.
BLDC Sürücü Sisteminin Elektroniği
Üç Fazalı Inverter Köprüsü
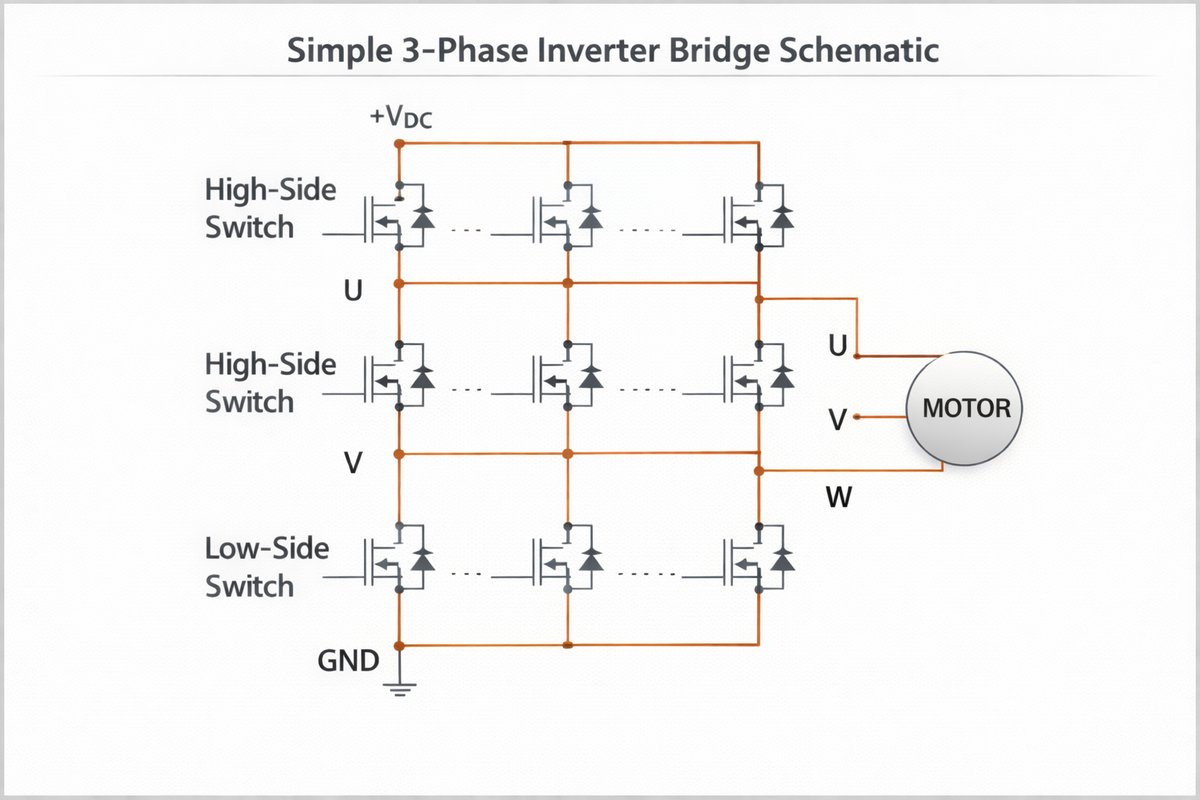
Bir BLDC motoru, kommutasyon yapmak için elektronik bir sürücüye ihtiyaç duyar. Güç aşaması, altı anahtardan oluşan üç fazlı bir invertördür. Bu cihazları doğru sırayla değiştirerek, sürücü DC gücünü motor fazlarına yönlendirir ve dönen bir stator alanı oluşturur.
Kontrolör Rolleri
• Güç anahtarları: MOSFET'ler birçok BLDC voltaj aralığında.
• Kapı sürücüsü + korumalar: güvenli anahtarlama, ölü zaman kontrolü ve arıza yönetimi.
• Kontrol mantığı (MCU/DSP): değişim zamanlaması, PWM kontrolü, sensör okuma ve limit yönetimi.
Fırçasız DC motorlarda hız, tork ve frenleme
Hız ve Tork Kontrolü: PWM ve Akım Sınırları
Hız kontrolü: PWM görev döngüsü, motorun etkin DC voltajını değiştirir ve bu da motorun hızını değiştirir.
Hız döngüsü: Kontrolcü hedef hızı ölçülen veya tahmini hızla karşılaştırır ve hata olursa çıkışı düzeltir.
Tork ve akım: Motor torku, faz akımıyla yakından ilişkilidir, bu nedenle akımı sınırlamak torku da sınırlar.
Akım sınırlaması: Sürücü, akımı izler ve gerektiğinde PWM'yi azaltır; böylece çalıştırma, durma ve ani yük değişiklikleri sırasında hasar önlenir.
Yön Değiştirme ve Frenleme/Regenerasyon Temelleri
• Yön tersine çevirme: Motor, faz dizisini değiştiren kommutasyon sırasını tersine çevirerek ters yönde çalışabilir.
• Frenleme: Tahrik, rotoru kontrollü bir şekilde yavaşlatmak için hareket yönünün tersine tork uygulayabilir.
• Rejenerasyon: Doğru koşullarda fren yaparken, motor bir jeneratör olarak hareket edebilir ve enerjiyi DC veri yoluna geri gönderebilir.
Yön kontrolü, frenleme ve rejenerasyon, sürücünün motor fazlarını nasıl değiştirdiği ve akımı nasıl yönettiğinden kaynaklanıyor. Değişim dizisini değiştirerek ve torku kontrol ederek, aynı BLDC motoru ileri veya geri çalışabilir, yavaşlayabilir ve bazı sistemlerde enerjisinin bir kısmını beslemeye geri döndürebilir.
Fırçasız DC motorların performansı ve sınırları
Bir BLDC motorunda hız ve tork nasıl davranır?
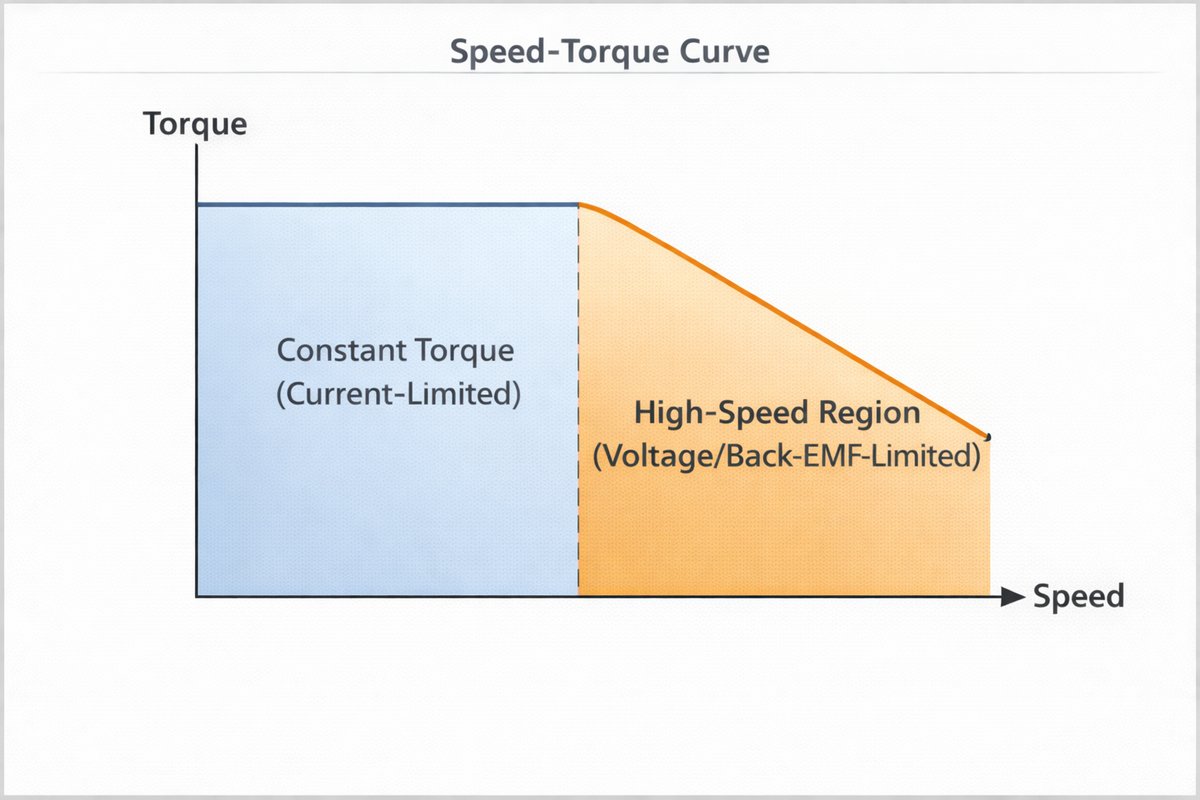
Fırçasız bir DC motor her hızda aynı torku vermez. Düşük hızda, tork sürücünün mevcut kapasitesiyle sınırlıdır. Daha yüksek hızlarda, motor DC bus voltajı ve geri EMF'nin sürücünün üretebileceği torku sınırladığı bir noktaya ulaşır. Hız–tork eğrisinde bu, düşük hızlarda neredeyse sabit tork, yüksek hızlarda ise düşen bir tork bölgesi olarak görülür.
BLDC motorunun maksimum hızını hangi faktörler belirler?
• DC veri yolu voltajı: Daha yüksek bir DC veri yolu voltajı, yüksek hızda geri EMF'yi aşmak için daha fazla voltaj alanı sağlar.
• Geri EMF (Ke/Kv): Geri EMF hız arttıkça ve sürücünün sargılara akım itmek için kullanabileceği voltajı azaltır.
• Kontrol yöntemi: Farklı kontrol yöntemleri, hız arttıkça sürücünün torku ne kadar iyi koruduğunu etkiler.
• Termaller: Sargılar ve elektroniklerdeki kayıplar hız ve yükle artarak motorun yüksek hızda çalışma süresini sınırlar.
Fırçasız DC motorlar için en önemli özellikler
| Spec term (katalog) | Size ne anlatıyor | Neden önemli |
|---|---|---|
| Nominal voltaj / DC veri yolu aralığı | Normal besleme voltajı aralığı | Olası hız aralığını belirler ve doğru sürücüyü seçmeye yardımcı olur |
| Nominal akım/sürekli akım | Uzun süre kullanım için güvenli akım | Belirli bir yükte ne kadar ısınma olacağını gösteriyor |
| Nominal güç (W) | Belirli bir noktada çıkış gücü | Farklı motorların ne kadar güçlü olduğunu karşılaştırmaya yardımcı oluyor |
| Nominal tork/pik tork | Motorun ne kadar dönüş gücü üretebileceği | Başlatma ve kısa aşırı yüklenmeleri nasıl yöneteceğini gösteriyor |
| Hız (RPM) | Normal çalışma hızı aralığı | Motorun dişlilere ve yüke uyum sağlamasına yardımcı oluyor |
| Kv / Ke ve Kt sabitleri | Bağlantılar hız, voltaj ve tork | Gerilim ve akımı gerçek motor performansına bağlar |
| Verimlilik | Giriş gücü ne kadar mekanik güce dönüşür | Isıtma, pil ömrü ve çalışma maliyetlerini etkiler |
Fırçasız DC motorlarda verimlilik, kayıplar ve ısı.
Fırçasız DC motorda kayıp kaynakları
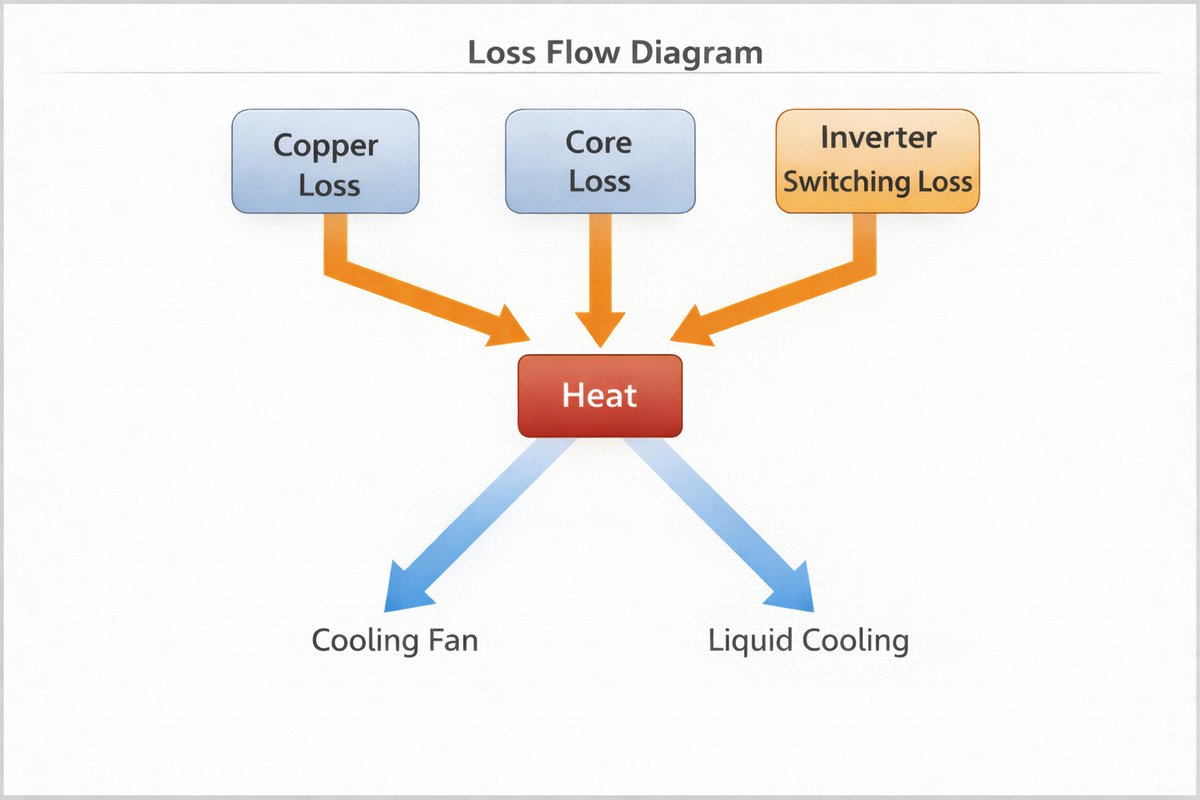
Fırçasız bir DC motor sisteminde, tüm giriş gücü faydalı mekanik çıkışa dönüştürülmez. Bir kısmı motor ve sürücü içinde ısıya dönüşür. Bu ısının çoğu bakır kaybı, çekirdek kaybı ve anahtarlama kaybından gelir ve bu kayıplar akım ve hız arttıkça artar.
• Bakır kaybı (I²R): Bakır kaybı stator sarımlarında gerçekleşir ve akımla birlikte artar. Daha yüksek tork daha yüksek akım gerektirir, bu yüzden tork talebi arttıkça bakır kaybı artar.
• Çekirdek veya demir kaybı: Çekirdek kaybı, statordaki değişen manyetik alanla ilişkilidir. Elektrik frekansı ve akı seviyesiyle artar, bu yüzden daha yüksek hızlarda daha gerekli hale gelir.
• Anahtarlama kaybı: Anahtarlama kaybı, motoru çalıştıran güç elektroniklerinde meydana gelir. Bu, PWM frekansına, anahtarlama cihazlarının türüne ve her anahtarlama olayı sırasında akan akıma bağlıdır.
BLDC sistemlerinde soğutma ve termal koruma
Hem motorun hem de inverterin güvenli çalışma sınırları içinde kalması için termal kontrol gereklidir. Isı, termik olarak iletken bir montaj yolu ve yeterli hava akışı yoluyla uzaklaştırılmalıdır; soğutma kısıtlandığında veya uzun çalışma süreleri beklendiğinde akım sınırları ise temkinli şekilde belirlenmelidir. Sıcaklık algılama ve termal geri dönüş, sıcaklıklar aşırı olduğunda akımı azaltarak sistemi daha da koruyabilir, bu da güvenilirliği ve hizmet ömrünü artırır.
Fırçasız DC motorların uygulamaları
Fırçasız DC motorların yaygın uygulamaları
• Hava hareketi için fanlar ve üfleyiciler
• Sıvıların taşınması için pompalar
• Elektrikli aletler ve küçük makineler
• Otomasyon ve hareket sistemleri
• Robotik eklemler ve aktüatörler
• Pil ile çalışan araçlar ve cihazlar
Sonuç
Fırçasız DC motorlar, kalıcı mıknatısları elektronik kontrol ile birleştirerek akıcı ve verimli hareket üretir. Gerçek performansları, doğru kommutasyon zamanlaması, rotor pozisyon geri bildirimi, kontrol yöntemi, invertör çalışması, soğutma ve doğru motor sürücüsü uyumuna bağlıdır. Hız, tork, verimlilik ve güvenilirlik bu faktörlerden etkilenir. Bunları anlamak, BLDC sistemlerinin nasıl çalıştığını, sınırlarını ve uzun vadeli performansı neyin etkilediğini açıklamaya yardımcı olur.
Sıkça Sorulan Sorular [SSS]
Sensörsüz bir BLDC motoru nasıl dururken çalışır?
Başlar, rotoru bilinen bir konuma zorla alır, ardından motoru açık döngüde çalıştırır. Motor geri EMF algılayacak kadar hıza ulaştığında, kontrolör normal sensörsüz çalışmaya geçer.
BLDC motorunda gürültü ve titreşime ne sebep olur?
Gürültü ve titreşim, rotor dengesizliği, hizalama hatası, aşınmış rulmanlar, dişli torku, düzensiz hava boşlukları ve PWM anahtarlamalarından kaynaklanır.
Yük ataleti BLDC motorunu nasıl etkiler?
Yüksek yük ataleti motorun hızlanmasını ve yavaşlamasını yavaşlatır. Ayrıca tork talebini artırır ve hızlı hız değişimlerinde akımı artırabilir.
BLDC sisteminde hangi güç kaynağı ve kablo noktaları önemlidir?
Güç kaynağı, gerilim düşüşü olmadan zirve akımı karşılamalıdır. Kondansatörler anahtarlama çivilerini yumuşatmalı ve kablolar doğru boyutta, kısa ve gürültüyü azaltmak için iyi topraklanmış olmalıdır.
BLDC sürücülerinde hangi koruma fonksiyonları kullanılır?
BLDC sürücüler, hasarı önlemek için aşırı akım, aşırı gerilim, düşük voltaj, kısa devre, durma ve aşırı sıcaklık koruması kullanır.
Çevresel koşullar BLDC motorunu nasıl etkiler?
Toz, nem, ısı, titreşim ve aşındırıcı koşullar performansı düşürebilir, parçalara zarar verebilir ve motor ömrünü kısaltabilir.









